Measuring Dust on the Red Planet: Muscle Wires On Mars
Friday, May 14, 2004

Every day we awake to a world of chance. Anything can happen, and usually we work hard to keep things from happening: bad things, unexpected things, things that disrupt our routines, that prevent us from performing tasks we've agreed to do, or that we think we must do. But in this world of chance, where luck favors the prepared, sometimes letting chance work its magic permits amazing things to happen.
In the summer of 1994, I opened myself to chance and eventually found myself participating in a series of events that would send a hair-like piece of a special wire from a drawer in the closet of my two-bedroom apartment to the surface of another world, to the red planet, Mars.
To Boldly Go
I have been a member of the Planetary Society, the public space advocacy group founded by Carl Sagan, Bruce Murray and Louis Friedman, since its inception in 1980. In 1992, an issue of their publication, The Planetary Report, described the work of Dr. Edward Belbruno and his novel way of sending spacecraft to other worlds using much less energy than previously possible, and therefore at much lower cost. Footnote 1
I'd always been a fan of low-cost space travel, so I wrote to Belbruno with some questions regarding his work. We conducted a conversation via email about his orbital designs, and then he switched topics to a new and bigger interest, sending robotic spacecraft to nearby star systems and receiving data back from them within a human lifetime. Footnote 2 Belbruno planned a conference on the issues surrounding this topic and invited me to attend.
At that time, I lived the life of a struggling entrepreneur, performing various consulting jobs for companies, both large and small, designing applications of nickel-titanium shape memory alloys (SMAs), thin wires that shorten when electrically heated. I had recently started a mail order business to help even out the irregular highs and lows of consulting income, selling a selection of "Muscle Wire" SMA kits and a book that I'd written on the subject. Two part-time employees helped me process and ship orders from the spare room of my two-bedroom apartment.
The prospect of taking time off to travel to New York City for something as far-out as interstellar travel simply did not have a place in my business plan. But Belbruno proved a persistent salesman. He enlisted my participation in building models of his interstellar satellite designs (a ring about 2 meters across that weighed less than a kilogram total and was covered with microscopic instrumentation). He also arranged for low-cost dormitory housing at New York University, the host for the conference, and invited me to give a presentation about my work with shape memory alloys. Because I could now view the trip as a "marketing expense," I took a chance and agreed to attend. Footnote 3

Figure 1 - Lever Arm demonstration for overhead projector. It operates much like the project described below, but rather than the small mass (bag of coins) it uses a thin elastic band to return the lever to its lower position. This way it can operate in a horizontal position.
Among the Stars
The conference proved astounding. Given the sponsorship of the Planetary Society, New York University, and the United Nations, Dr. Belbruno had attracted a list of attendees that shone with some of the brightest stars in the aerospace sky. I sat, like an invisible red dwarf, in rapt attention to presentations by luminaries that included Dr. Robert L. Forward (interstellar travel visionary), Dr. Seth D. Potter (space power satellite research), Dr. Robert Zubrin (later to found the Mars Society), Dr. Brice Cassenti (United Technologies Research Center), Dr. David Brin (scientist and award winning science fiction author), the mysterious Dr. Claude Poher from CNES (the French space agency), and many others. Footnote 4
I prepared my talk with John D. Busch, then of TiNi Alloy Company, one of my consulting venues. Entitled "A Survey of Micro-actuator Technologies for Future Spacecraft Missions," we endeavored to gather and compare all known ways of creating motion from electricity, with attention to how they might be used on lightweight interstellar spacecraft. Footnote 5
My presentation went well, with the various examples and working devices proving of interest to the attendees. In particular, Dr. Geoffrey Landis from NASA's Lewis (now Glenn) Research Center, studied a lever arm device operated by a short length of Muscle Wire that I had developed for use on an overhead projector during my talk. I included this lever arm as a project in the Muscle Wires Project Book, and Dr. Landis arranged to order a copy of my book and some sample wire for a project he had in mind.
Faster, Better, Cheaper (and from my closet!)
In the 1970's NASA performed much pioneering research into using SMAs for space applications. But with the catastrophic loss of the billion dollar Mars Observer mission due to a leaky fuel valve, the new NASA administrator, Dan Goldin, instituted the mantra of "faster, better, cheaper" and, for the first time in many years, NASA researchers were encouraged to design new instruments and spacecraft and fly them into space. Suddenly, SMAs found new opportunities to travel beyond the Earth on U.S. space missions.
Back in Ohio, Geoff Landis and research partner Phillip Jenkins began crafting a small, Mars-worthy instrument called the Materials Adherence Experiment (MAE). It consisted of a thin glass plate positioned above a small solar cell, with a 3 cm (1.2 inch) length of Flexinol 150 LT Muscle Wire. The wire provides an extremely small, lightweight and low-power source of motion. As thin as a human hair, the specially processed nickel titanium wire has a breaking strength stronger than stainless steel, and, when powered with a small electric current, it exerts a force capable of lifting 330 grams (over 11 ounces) in Earth's gravity.
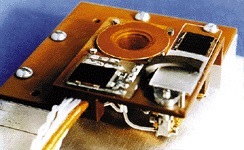
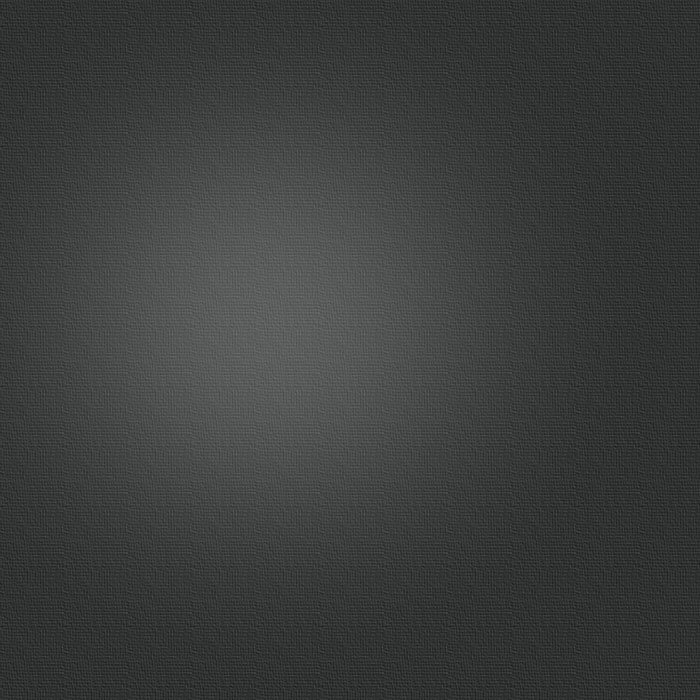
Figure 2 - The Mars Pathfinder Robot’s Materials Adherence Experiment or MAE.
When activated, the Muscle Wire pulls the glass plate to the side, exposing the solar cell to full sunlight. Then, with power removed from the wire, it relaxes and permit the glass to return to its position over the solar cell. Any dust on top of the glass reduced the amount of light reaching the solar cell by a small amount, and by comparing the signal of the direct sunlight to the signal through the dusty glass plate, Landis and his team hoped to determine the rate of dust build-up on the top of the glass slide.
The MAE instrument rode aboard the Mars Pathfinder Sojourner robot, positioned on the top corner of the robot's flat solar panel. Since dust build-up greatly reduces the effectiveness of the solar panels, excessive dust levels could possibly bring an early end to a solar-powered mission to the surface of Mars. But how quickly dust accumulated on Mars had never before been measured.

Figure 3 - MAE on Mars aboard the Sojourner Rover.
Mondo-tronics shipped the Flexinol wire to NASA from the same supply serving our hobbyist, student and experimenter customers, right out of the file cabinet in my spare bedroom closet. Since we knew where it might be going, all three of us touched the wire before sealing it in its envelope, and wishing it good luck. Launched in December 1996, the Mars Pathfinder and the Sojourner rover touched down on Mars on July 4, 1997. The mission proved a spectacular success. The rover worked wonderfully, and the MAE performed perfectly over the life of the mission by measuring the buildup of Martian dust on the rover's top surface.
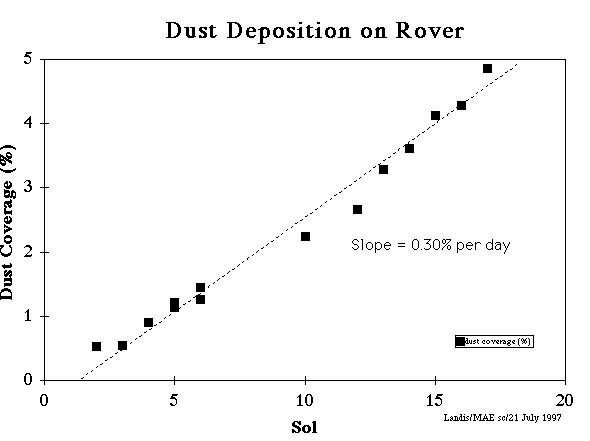
Figure 4 - Results of MAE measurements showing dust build up on the Sojourner Rover's top surface. These measurements affected decisions in the design of the Mars Exploration Rovers, Spirit and Opportunity, which began exploring Mars in January of 2004.
For more on the MAE instrument and its results see: http://powerweb.grc.nasa.gov/pvsee/experiments/MAE.html
Project: Build a Basic Muscle Wire Lever Arm
In this device, a length of Muscle Wire moves a lever which lifts a weight. This project shows how simple levers can transform the small motion of a Muscle Wire into a weaker but much larger motion. A device like this, presented at the Robotic Interstellar Flight conference in 1994, led to the development of the lever arm device in the Materials Adherence Experiment carried aboard the Pathfinder Sojourner Rover on Mars in 1997.
The project is excerpted from Roger G. Gilbertson, "Muscle Wires Project Book, Third Edition," Mondo-tronics Inc. (ISBN 1879896133).
Parts List: Basic Muscle Wire Lever
Quan Description
1 Muscle Wire, 150 um dia, 10 cm long
2 Crimps (N-scale rail joiner, brass tube, etc.)
2 Staples, bent as shown
2 Thin connecting wires (#30 wire wrap wire or similar)
3 Tacks
1 Cardboard base (corrugated, about 12 x 23 cm)
1 Cardboard lever (see Figure 6)
2 1.5-volt AA batteries
1 Battery holder (2 x AA, 3 volt)
12 U.S. 1 cent coins (or other 30 gram mass)
1 Small plastic bag
- Tape, transparent
Construction
Assemble the Muscle Wire, crimps, staples and connecting wires as shown in Figure 5. This crimp, staple, and wire method provides both mechanical and electrical connection to a Muscle Wire. N-scale track connectors for model railroads are inexpensive and easy to crimp. Bend staple (A), insert it and conductive wire into connector (B), and crimp with pliers (C). Add Muscle Wire to other end (D), and crimp it for a solid mechanical and electrical contact (E).
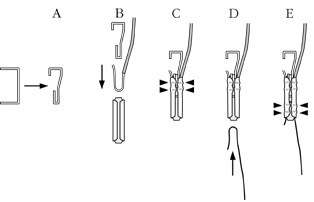
Figure 5 - Basic Crimp and Wire Connection.
Copy the lever arm pattern (Figure 6), print it to the correct scale and glue it to thin cardboard (poster board or an empty cereal box). Cut out the cardboard lever and tack the free end of the Muscle Wire to the lever at the point labeled "W." Note that this tack points outward from the cardboard base.
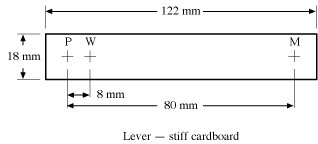
Figure 6 - Lever Arm pattern.
Tack or push-pin the lever to the cardboard base at the point labeled "P". Position the pivot tack to take up any slack in the Muscle Wire so that the lever points downward to 4 o'clock.
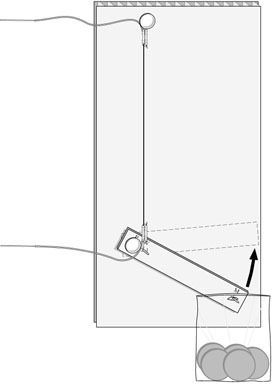
Figure 7 - General Assembly for the Basic Lever. When powered, the wire contracts about 5 mm and raises the end of the lever by about 50 mm.
Place the coins in the bag and, using another tack pressed through from the back, hang the bag at the point labeled "M" (see Figure 8). Tape the connecting wires to the base with some slack so the lever can move freely.
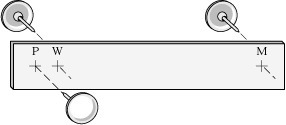
Figure 8 - Lever Assembly. Note the directions that the tacks are inserted into the cardboard arm.
Insert two AA batteries in the battery holder and briefly apply power to the connecting wires for about 1 second. The Muscle Wire should contract and move the lever about 30 degrees (above the 3 o'clock point). Remove power immediately and allow the wire to cool and relax.
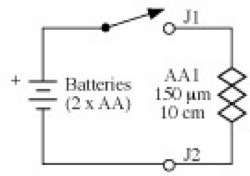
Figure 9 - Basic Schematic. Points J1 and J2 show where the batteries and Muscle Wire connect, acting as a switch. The accordion-like symbol for the shape memory alloy wire element reflects both its internal resistance (which generates heat from the passing of an electric current), and its ability to contract.
How it Works
The powered Muscle Wire contracts and lifts the lever arm. Since the distance from "P" to "M" is ten times the distance "P" to the "W", the force exerted by the 30 gram mass is ten times greater at the "W" point.
The wire lifts the lever about 5 mm at the "W" point, which becomes about ten times or 50 mm of motion at "M". Note that multiplying the force times the lever length is an approximation that works only with the lever at or near 90° to the wire. Since the lever moves in an arc, use trigonometry to calculate its performance with other angles and positions.
Experiments
* Mark the start and end points of the lever's motion on the cardboard. Measure the distances and calculate the wire's percentage of contraction. Move the tacks so the lever starts at the 1 o'clock position. How much does it move?
* Increase the 30 gram mass by adding one coin at a time. At what point does the device fail? What parts are likely to fail and why? How would better materials and construction help?
* Observe your own arm and notice how the muscle in your upper arm contracts to lift your forearm. Can you locate the "P and "W" points on your elbow joint? Estimate the percentage that your upper arm muscle must contract to lift your wrist by 10 cm.
* Given your estimate above, if you hold a 1 kilogram mass in your hand, how much force does it exert where the muscle connects to the forearm (at the "W" point)?
Our Cosmic Shooting Gallery
The Cretaceous-era dinosaurs never knew what hit them. But we know for certain that Earth will inevitably find itself in the sights of a cosmic projectile capable of again extinguishing nearly all of its major life forms. Though we may not face this threat for years, centuries or even millennia to come, human beings are the first species on Earth, and perhaps the last, capable of identifying and possibly preventing such a catastrophe.
With resolve, and with a modest but long-term investment of resources, we can identify and categorize the various potential threats, and develop methods of deflecting, destroying or even capturing the potentially menacing objects. Footnote 6
Given the present status of our space program, many people ask if we still have what it takes to keep sending humans and robots to other worlds. But we have no choice. If we stop our efforts to become masters of interplanetary space, then we accept extinction as our ultimate fate.
In this world of chance, what greater role could we play than to awake one morning to the threat of a biosphere-destroying impact, and to know that we can and will prevent it from happening. By comparison, all our other concerns of the day fade to insignificance.
Build more robots!
This article is based on an article first published in the April 2004 issue of Servo Magazine (ServoMagazine.com).
A second part of this article will present a more elaborate version of the Simple Lever Arm device, and includes a photo sensor to measure the buildup of dust on your desktop, in a manner like the MAE.
Flexinol is a trademark of Dynalloy, Inc. and Muscle Wires is a registered trademark of Mondo-tronics, Inc.
ABOUT THE AUTHOR
In college Roger G. Gilbertson studied engineering, robotics and the walking patterns of living creatures. In 1987, he co-founded Mondo-tronics, Inc. to explore the commercial applications of Shape Memory Alloy wires, and in 1995 launched RobotStore.com, the internet's first commercial robotics site. Mondo-tronics' Robot Store continues to lead the field in presenting the best and most innovative new robot products for students, educators, hobbyists and experimenters. Roger lives and works in Marin County, California, where robot can sometimes tell us when we're wrong, but seldom can tell us why.
Copyright 2004 by Roger G. Gilbertson.
Footnotes
1. Edward Belbruno, "Through the Fuzzy Boundary: A New Route to the Moon." The Planetary Report, May/June 1992, pp. 8-10. The method relied on complex mathematics very different from those used in, for example, the Hohmann transfer orbit used to reach the moon on the Apollo missions. It has longer flight times but permits robotic missions to travel using much less fuel (i.e. less cost) or to take a larger payload using the same amount of fuel. Belbruno's methods were used successfully on Japan's Muses-A lunar spacecraft (later renamed Hiten) and the European Space Agency's Smart-1 mission.
2. The basic concept is to make the spacecraft very lightweight and send it very fast, up to 90% of the speed of light (c). A 1 kg satellite would be accelerated from Earth orbit using a particle beam (like launching a pie tin on the stream from a fire hose). It would reach 0.9c in a matter of days, about when it crossed the orbit of Jupiter, and could pass through the Alpha Centauri star system less than 5 years later. The data beamed back to Earth from its encounter would arrive after another 4 years. Given the nature of the challenges, it might be best to launch a fleet of them at a given target, sort of a robotic shotgun blast, to ensure that some of them reach their target and pass close enough to the target star to gather sufficient energy for reporting the findings of the entire armada back to Earth. As yet, the amount of energy required to accelerate 1 kg to 0.9 c exceeds our present capabilities, but not by much.
3. "Practical Robotic Interstellar Flight: Are We Ready?" August 29 - September 1, 1994, New York University and The United Nations, New York City. Sponsored by the Planetary Society.
4. It amazes me now to note how many of the attendees are not only accomplished aerospace innovators, but how many have written well-received works of science fiction including Forward, Zubrin, Brin, and Landis.
5. First published in The Journal of The British Interplanetary Society, Vol. 49, pp. 129-138, 1996. A March 2003 version of the paper in PDF format may be found here. The list of methods includes: Electromagnetic, Electrostatic, Thermomechanical, Phase Change, Piezoelectric, Shape Memory, Magnetostrictive, Electrorheological, Electrohydrodynamic and Diamagnetism.
6. See http://www.spaceguarduk.com/ and http://www.b612foundation.org/ for starters.
by Roger G. Gilbertson
Published online by The Society for Amateur Science.
This is based on an article first published in the April 2004 issue of Servo Magazine.
Elements of Chance